Week 12: Preparing for NorCal Championships
2 weeks ago, the Breakerbots competed at the Pinnacles District, our second district of the season. Now, we’re in preparation for Hi

Week 11: Pinnacles Regional
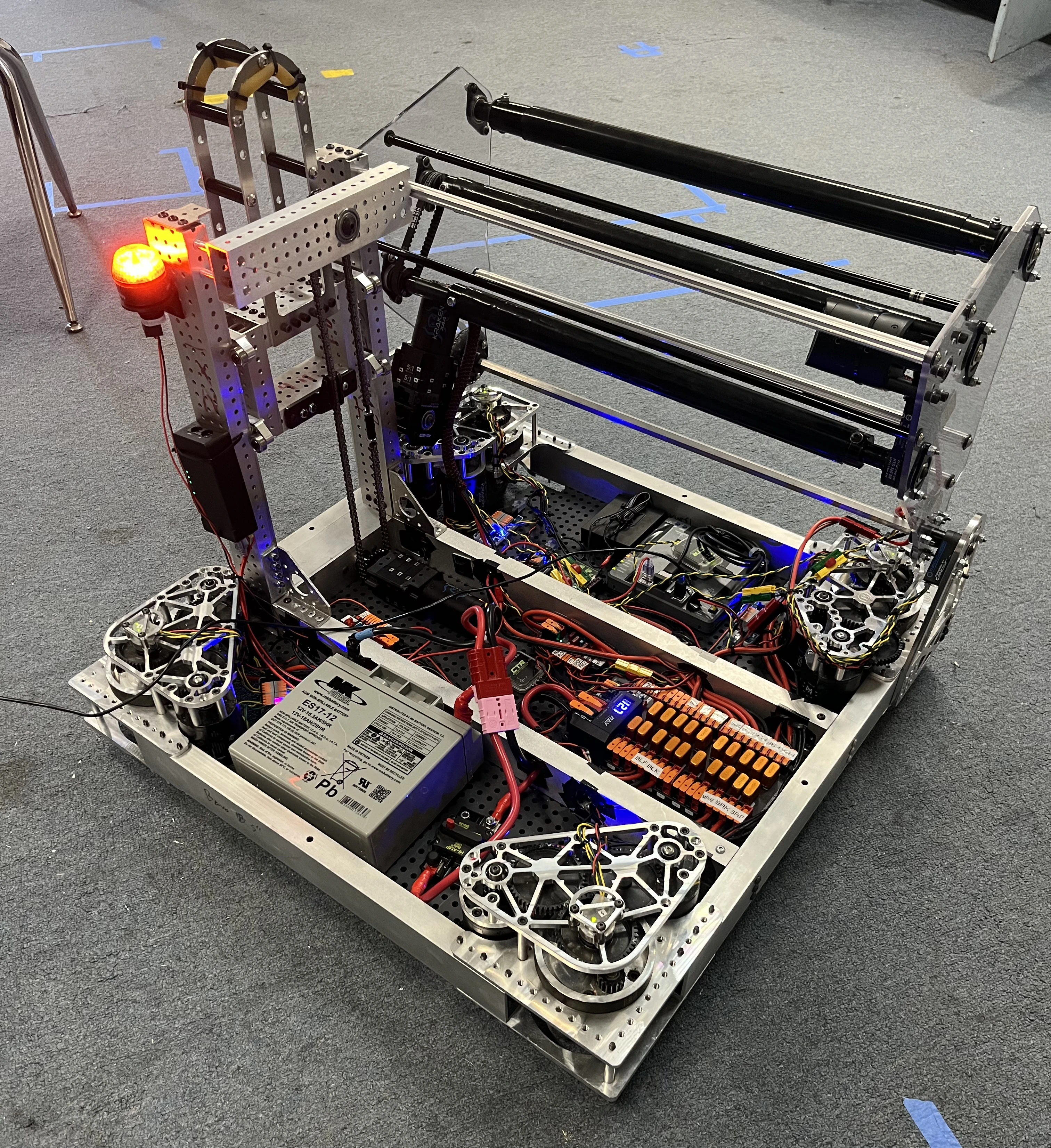
Last weekend, the BreakerBots competed at the Pinnacles District Event in Hollister, which was our second regional of the season. Our overall performance was better, since we were prepared for necessary fixes and had a hood that aimed much more accurately. Though we had to overcome a few issues, we still contributed a lot of fuel to our alliance’s score. In the final qualification match, our alliance scored 650 points, which was the highest score of the entire competition! Despite our elimination in Round 4 of the semifinals, we have still earned 87 district points, which gives us a very good chance of being accepted into the NorCal championships. We are now evaluating Nausicaa’s performance as well as the team’s performance at the competition, since if we are accepted, we will need to try our hardest at NorCal to have the best chance of advancing to the world championships. Stay tuned to see just how far we can go!

Week 10: Fixing the Robot
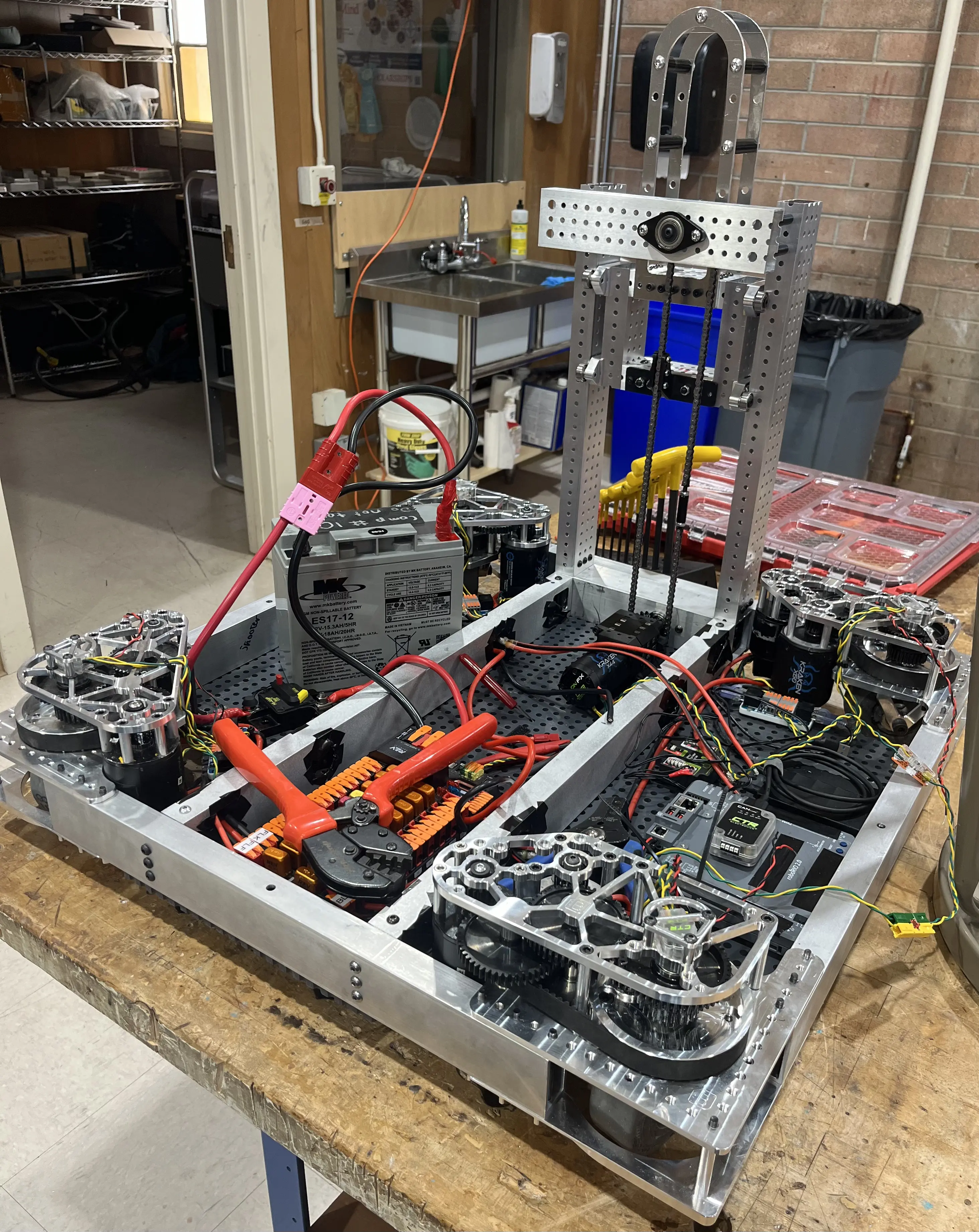
That time of the week again—it's the end
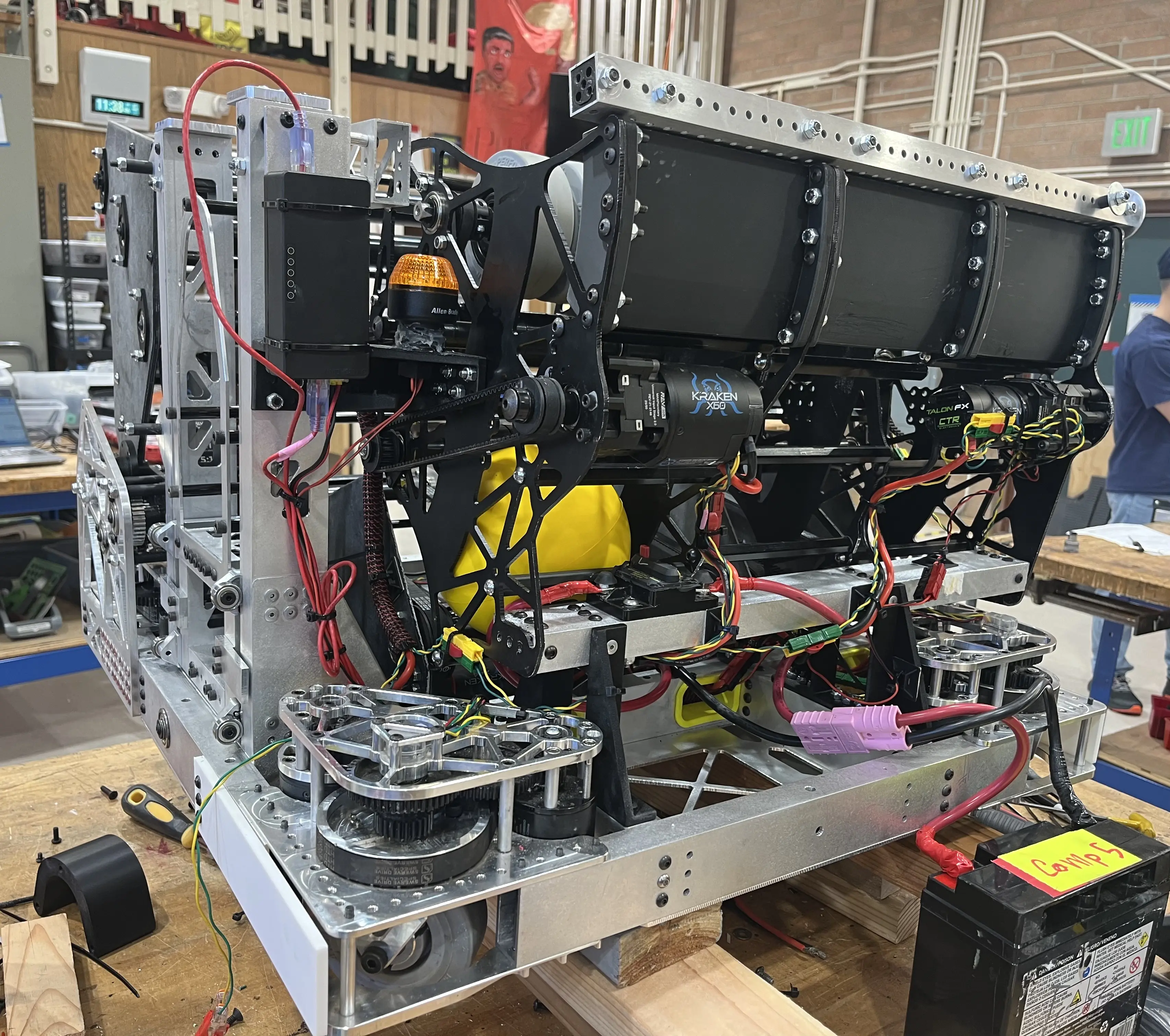
of Week 10, and the Breakerbots are making big strides! This week, we got super
close to replacing our broken subsystems with brand new
parts to recover from the damage we took at our last District
event. Once we finish, our focus will shift to handing
Nausicaa over to programming again so they can fine tune the
robot in preparation for Pinnacles. On top of that, we’re
working on preparing all our spare parts to ensure we’re fully
equipped for the challenges ahead. With these improvements,
we’re feeling confident and excited as we near the
Pinnacles District Event—let’s keep the momentum going!
Week 9: San Francisco Regional Event
During week 9 of build season, the BreakerBots departed off to the San Francisco Regional Event, and we did very well! In qualifications, we ended up rank #5 out of 38 teams, and were first pick for the third alliance, with teams 7667 and 8016, who were incredible alliance teammates. We experimented with new autos and ended up with a consistent auto which scored us many points every match! Mechanically and electrically, we did not have to fix any major breaks on the robot, though it needed a lot of repairing after playoffs. As for playoffs, we made it to semi-finals, but unfortunately were eliminated as our shooter broke and we could no longer score points. Despite this, we won the Industrial Design Award and went home feeling proud, ready to fix our robot and improve it even more so we can do better at Pinnacles. See you there!
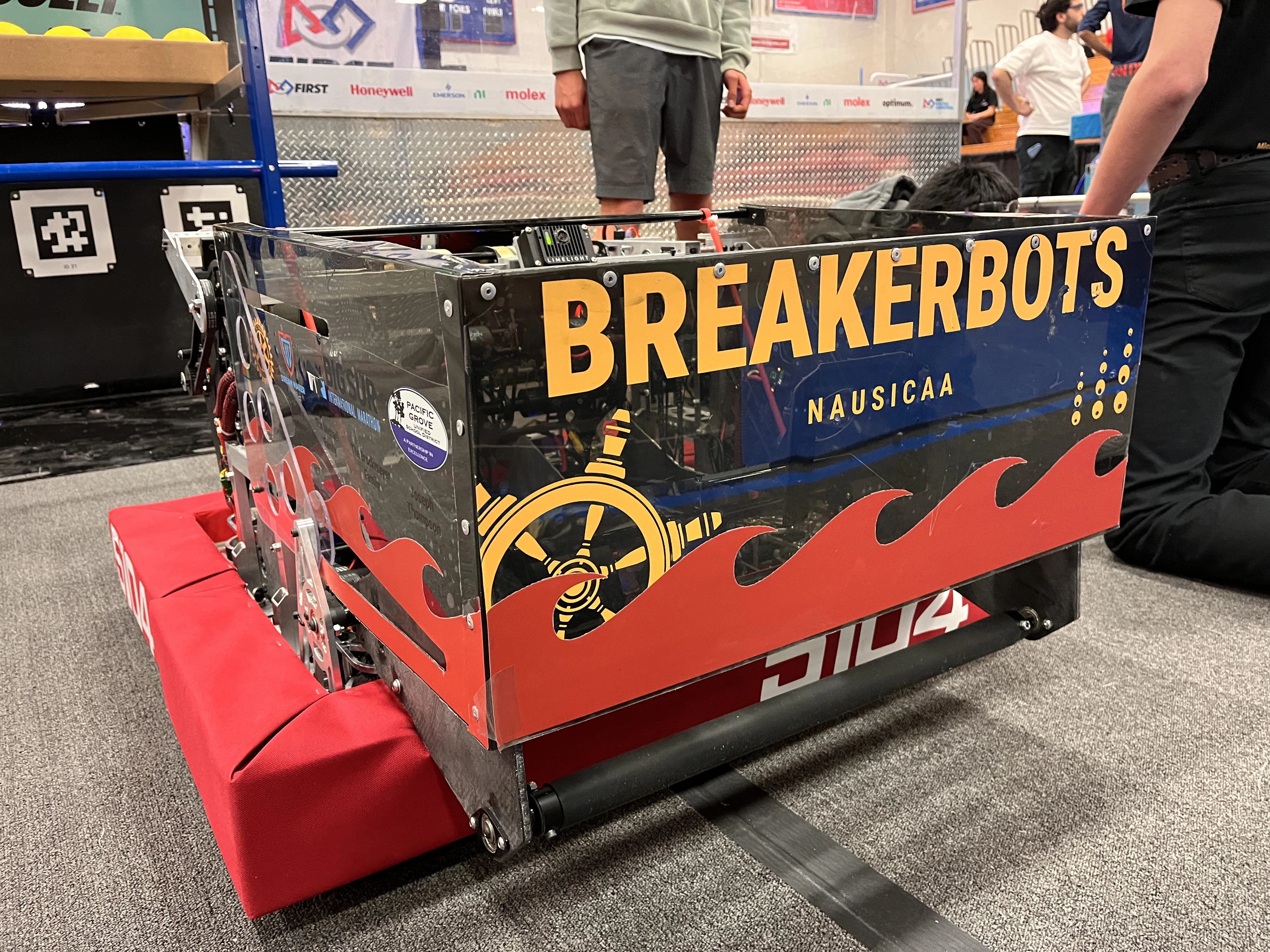
Week 8: Preparing for San Francisco
This week, the Breakerbots are close to completing our final robot, Nausicaa, and taking it to our first competition of the season, in San Francisco! After weeks of preparation, we are excited to hit the field and compete alongside so many talented teams. But before that, we’re going to finally hand off Nausicaa to the programming team, so they can bring the robot to life. Meanwhile, we are also working on fixing our hood design for the shooter, and other subteams will work on preparing for our competition, which includes making buttons! If you happen to be competing at the same competitions as us, make sure to come by our pit and pick some buttons up!
Week 7: Scrimmage
This week, the BreakerBots made big progress! We’re almost finished with building the subsystems for Nausicaa, and things are looking very promising. We also attended the Week 0 Scrimmage at Monterey High School, bringing our Bravo Bot with us. We learned many things about the game, and Bravo Bot, that we intend to fine tune on Nausicaa. Our alliance ended up winning the scrimmage, as our drive team gave it their all, and learned from their training. Meanwhile, we designed a sponsor board for our hopper, and we aim to show up to our next competition with style.

Week 6: Beginning Nausicaa
It’s that time of the week again—another big step forward for the Breakerbots! This week, we wrapped up work on Bravo Bot and have officially shifted our focus to building the final designs for our competition robot, Nausicaa. While the build team gets to work, the drive team has been sharpening their skills with continued practice, continuing with a mock field to simulate real match conditions. On top of that, the programming team is working on Bravo Bot, and gaining experience day by day. We’re also looking forward to visiting the Week 0 Scrimmage for local teams next week, giving everyone a chance to test their robots in a real-game environment. Exciting progress all around—stay tuned as we bring Nausicaa to life!

Week 5: Fine-tuning
This week, the Breakerbots made some exciting progress! We’re almost finished with Bravo Bot, and all we need to do is finish the shooter and hopper then mount everything onto the chassis. After a lot of hard work, the programmers can finally be able to start working on Bravo, and bring the robot to life with code. It’s a big milestone, and we’re eager to get started on the next phase, beginning to design and build our final competition robot, Nausicaa! Stay tuned for more updates as we keep pushing forward!

Week 4: Continuing Bravo Bot
This week, we successfully mounted our robot climber and intake, and handed it off to the programming team. The programmers have been working tirelessly to fine-tune the robot, making adjustments to ensure optimal performance. Meanwhile, the drive team has been practicing in the Student Union, getting more comfortable with the drive train by each day. Once we have the full practice field set up, and once Bravo Bot has been finished, they’ll be able to run more advanced drills, including climbing the tower and shooting into the hub. Everyone is working hard, and with competition season getting closer, we’re excited to see all the pieces coming together!
Week 3: Wiring
This week, we’ve made great progress on our development robots. With Alpha bot fully wired, our electrical team has begun to wire Bravo bot, our second development robot. Our design has an intake that pivots out of our robot to pick up game pieces, and feeds them into a hopper which stores them and feeds them into the shooter, which can shoot multiple game pieces at a time anywhere on the field. Finally, our robot has an elevator with a hook, allowing it to climb onto the side rungs of this year’s tower. Next, we’ll finish the electrical work and hand the robot off to programming for testing and refinement. At the same time, the CAD team is hard at work creating the final design for Nausicaa, our final robot which we will take to competitions. Everyone has contributed their skills and effort, and the excitement is building as we bring Nausicaa closer to completion!
Week 2: Building/Programming
Kicking off week two, the BreakerBots fully assembled our Alpha drive train, handing it over to programming. Ready to begin the assembly of the Bravo chassis, the mechanical team prepared new swerve drives and motors, and ended off with attaching the bellypan and crossbars. Other mechanical members began to assemble our first climber which will be attached to the Bravo chassis, made up of a single stage elevator and a hook. We also successfully built a few field pieces, including the hub, the trench, and the bump. In addition to that, our coach has begun to train members on driving the robot, preparing them for our upcoming competitions. Be sure to come back for the week 3 recap!
Week 1: Prototyping
During Week 1, the BreakerBots worked on CAD and prototypes for their 2026 robot. The team prototyped many different designs for the fuel intake, and the shooter, and are working on finalizing design decisions for these tasks. The CAD team started making models of these mechanisms as well as a master sketch of our final robot, and our mechanical team assembled the robot’s chassis and wired it. Finally, on January 17th, BreakerBots participated in the 2026 Chartwell Review with other local teams. Now, our software team will start programming the drive train, and the team will continue refining prototypes for our new robot.

Week 0: Kickoff
This year’s game event, Rebuilt, started off with a
blast revealing a new
game,
new challenges, and new robot opportunities, and we are eager to step up to the challenge!
This fall, we gained many new members, bringing our total to over 20 teammates,
all of whom are excited to get the build season started.
With a new game comes new rules, designs, and ideas, so our first
task
was to become familiar
with the rules.
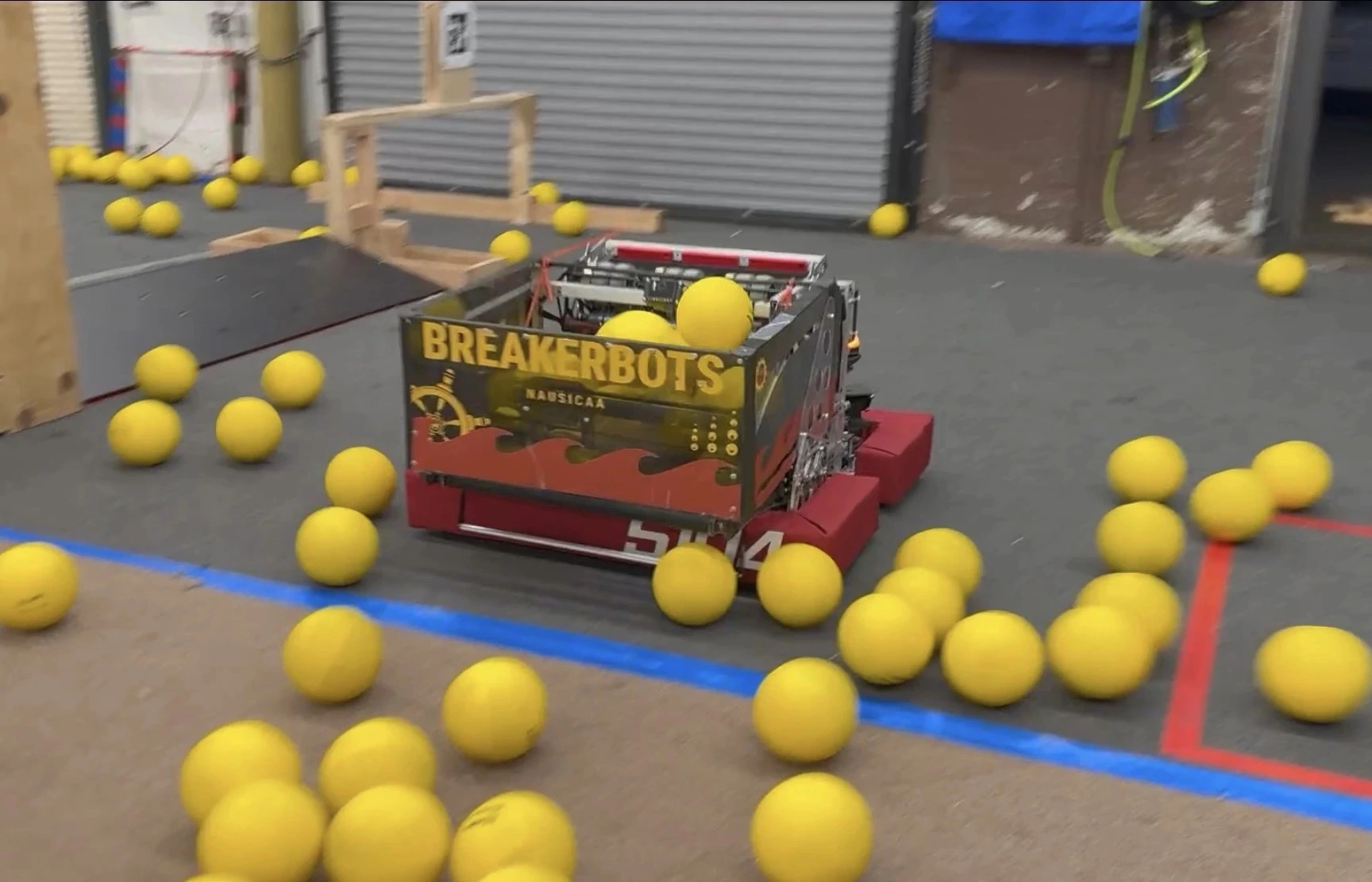
In short, our robot must pick up balls, shoot those balls into our alliance hub,
and be able to climb onto a tower with
3 levels of height. Once we understood the game, we came up with designs,
strategies, and concepts to help us create the
most optimal robot to achieve these tasks.
After kickoff day, we will have 9 weeks before heading off to the
San Francisco District Event to face
off against many competitive teams.
Be sure to come back next week for the BreakerBots Week 1 Recap!