Nausicaa 2026 - Rebuilt
Nausicaa, our 2026 robot, highlights the efforts of our team in every subsystem. Our robot is capable of intaking from the ground and human player station, traversing under the trench and over the bump, passing fuel from the opposing alliance zone/neutral zone into the alliance zone, and scoring from anywhere in our alliance zone.
-
Weight: 114.7 lbs
-
Size: 27" W x 25" L x 21.5" H
-
Drive/Bumpers: Swerve drive train controlled by BreakerLib’s swerve drive code, with a bumper opening on the robot’s left enabling the (now nonfunctional) climb elevator to enclose the side of the tower.
-
Intake: Over-the-bumper full width intake with a metal bar to protect important components in collisions, using one motor to pivot the intake over the bumper and one motor to spin the rollers.
-
Hopper: Extendable/retractable polycarb enclosure that can hold 34 fuel with a vinyl display of our sponsors and our title on the outside, hooks into extrusions from the hood and deploys on initialization of the autonomous period.
-
Indexer: Six belts on the edges of three channels separated by metal plates that guide fuel into one of our three groups of shooter flywheels.
-
-
Shooter: Three groups of flywheels with two colson wheels and one brass flywheel each, in addition to four slower wheels in each group that increase the speed of the fuel before it is fed into the main wheels.
-
Hood: Three curved plates that emerge from three pockets of a similar size, connected by belts on both sides; one side is powered by a motor and the other connects to an encoder allowing for precise aiming of the shooter’s output.
-
-
Vision and Automation: This year, we used three Limelight 4 cameras that allowed us to have full-field localization with MegaTag. We also use some of our own vision methods to rotate to the hub and interpolate between data points to find accurate shooting angles for our hood. This allowed us to decrease the driver’s need for precision in favor of consistently fast cycles.
-
Autonomous: Our robot can go under the trench to the neutral zone, intake fuel, and come back to the alliance zone, emptying the hopper into the hub. Later, we also added on to this auto by adding another half a cycle to end the autonomous period with a full hopper, allowing us to immediately shoot again in the transition period.
-
Industrial Design Award: San Francisco District
- Code: Nausicaa

Minnow 2025 - Reefscape | Off season
Minnow, our off-season bot for the Reefscape 2025, was built for the sole purpose of learning and preparing our almost all-rookie team for competition season. We made sure to keep our design simple and effective with the Robonaut’s Everybot design which included all of the robot code and the complete cad file if we needed some help. To test, we took this robot to Cal-games, an off season competition near us. This allowed our new team to gain experience of what a competition feels like before the actual competition season. Although it’s not a complicated robot, Minnow has definitely served its purpose for preparing our team for the next seasons to come!
-
Weight: 98.6 lbs
-
Size: 28" W x 28" L x 27.7" H
-
Algae: A single pivoting arm equipped with compliant wheels extends beyond the bumper to collect algae from the ground and store it within the robot. When required, the wheels reverse direction to extake the algae into the processor. The compliant wheel bar is driven by a Falcon motor, while the pivoting arm is powered by a Kraken motor.
-
Coral: A fixed box has openings on the top and side, with slots in the bottom for the algae bar’s compliant wheels. Coral is loaded through the top by rolling it in from the human player station. The algae bar then pivots up and spins to push the coral out the side opening and into the trough.
-
Autonomous: We run a single blind autonomous routine from the center of the field that drives to the reef and scores one piece on L1.
- Code: Minnow
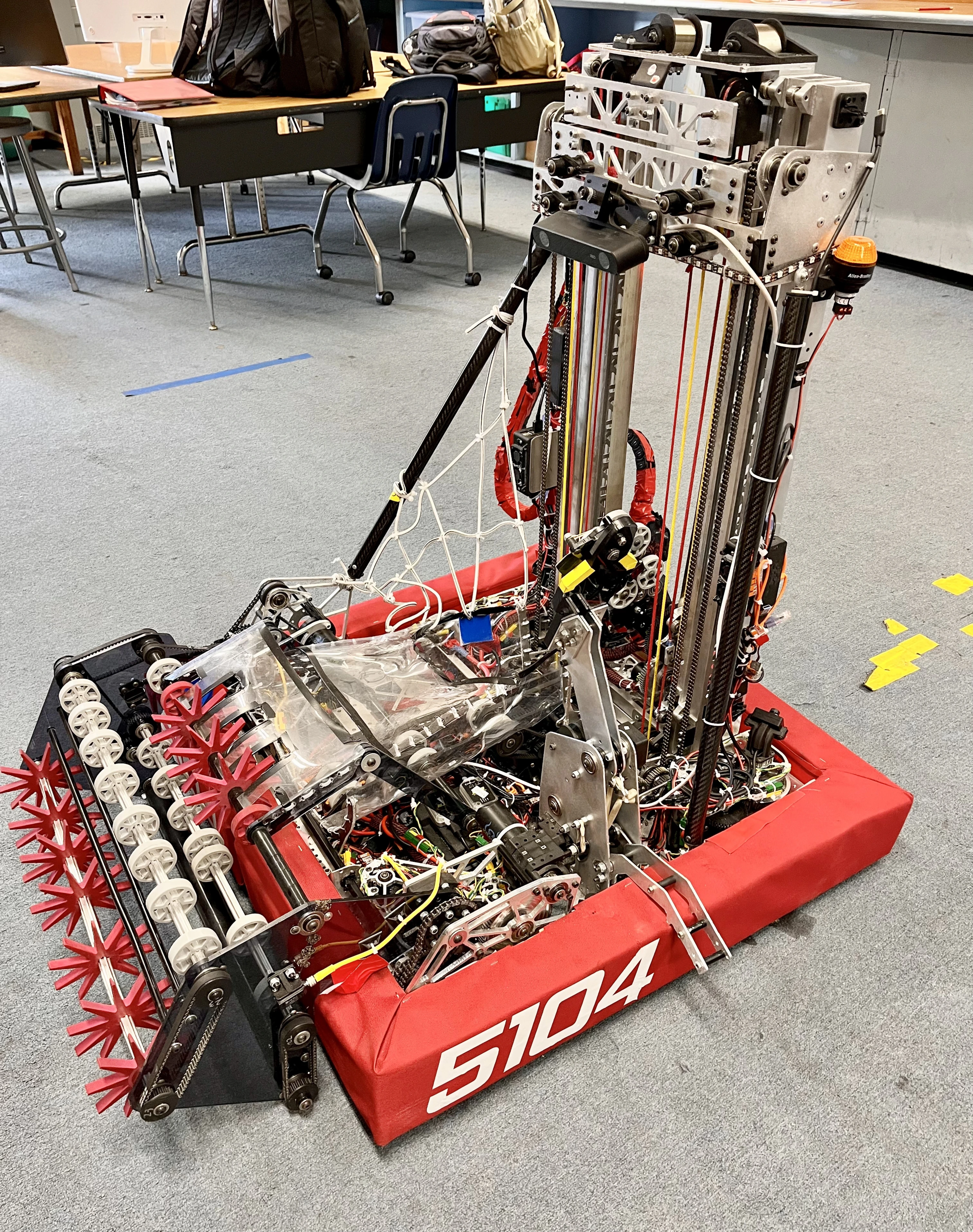
Leviathan 2025 - Reefscape
Leviathan represents the culmination of numerous years of research, development, and hard work. A robot not only capable of scoring in all four levels of the reef, but also doing so fully autonomously, from anywhere, and at any time. In fact, between its 4 localization cameras, ZED stereo camera, and 5 coprocessors, Leviathan can operate almost fully without human input, even in teleop.
-
Weight: 113.6 lbs
-
Size: 28" W x 28" L x 36" H
-
Intake: Over-the-bumper style ground coral intake using rubber wrapped carbon-fibre rollers and compliant wheels. Automatically orients coral and either passes them on to the indexer or stops them in place using a 12khz hardware interrupt driven beambreak. Coral stopped in the intake can be scored in L1.
-
Indexer: Semi-passive funnel type indexer used to center and re-orient coral from the intake by 90 degrees. Uses the physical deflection of its frame and walls to re-direct coral. Driven by a chain of compliant wheels at its bottom run by a Kraken x44.
-
Elevator: A custom 3-stage cascade rigged elevator driven by 2 Kraken x60 motors. Capable of extending up to 80 feet in less than one second. Its carriage mass is couter-balanced by a pair of constant force springs, leaving the total effective driven mass at 8 lbs. Driven in part by fully 3D printed gears, the elevator was designed specifically to allow our end effector to traverse through the frame of our elevator to move coral from our indexer/stow position to our scoring locations.
-
Wrist: Controls the end effector's pitch angle using a minion motor, custom tensioned chain drive, and 3d-printed chevron gears. Capable of both exceptional speed and accuracy. The entire system was designed to fit into less than 7 inches of space while allowing more than 270 degrees of motion.
-
Finger: Thin polycarbonate extension surrounded by complaint wheels designed to grip coral from the inside. Also driven in part by fully 3D printed gears, it integrates a Minion motor to drive its wheels and diffuse reflective presence detection sensors. Leviathan can also use this to remove Algae from the Reef.
-
Climb: Levianthan’s climb was designed from the ground up by 5104 over numerous iterations. It features a polycarbonate grappling-hook driven by a winch and spring. When unspooling its winch, the hook’s arm is driven by spring tension to extend, eventually releasing a mechanical lock which extends its ‘foot’. Leviathan then uses its momentum to engage its grappling hook with the bars of the Cage and its foot with the Cage's floor. Then it re-spools its hook, using its foot as a lever, Leviathan climbs the Cage.
-
Vision: Localization is handled by 4x Thrifycam Global Shutter cameras connected to 4x OPi 5 Pro coprocessors. Vision data from these cameras is processed by a real-time SLAM localizer running on our Nvidia Jetson coprocessor. Alongside our SLAM, the Jetson also runs a fully-custom CUDA accelerated stereo depth camera pipeline used to track game pieces in true 3d using a ZED 2i stereo camera.
-
Automation: Leviathan is highly focused automation, and can score on any reef node, intake coral from the human station or ground using stereo-depth cameras, and execute a full climb, all with single-button automation. It selects optimal targets, navigates obstacles, plans motion paths, and even auto-controls its orientation during manual driving to reduce driver workload, while still allowing semi-autonomous and manual operation.
-
Judges' Award: Pinnacles Regional
-
Gracious Professionalism Award: San Fransisco Regional
-
Innovation in Control Award: Contra Costa Regional
-
Industrial Design Award: NorCal Invitational
- Code: Leviathan (Build Season)
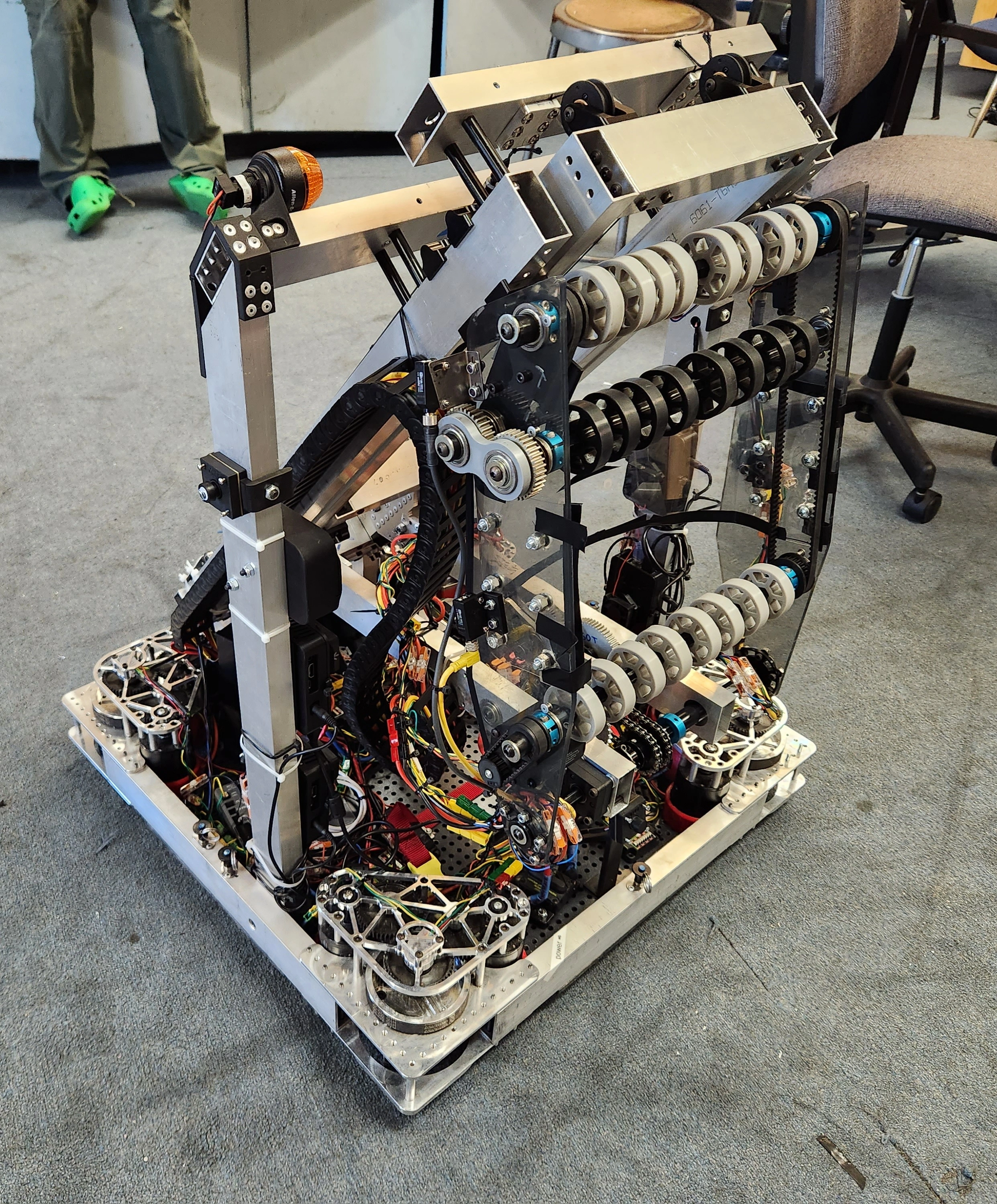
Typhoon 2024 - Crescendo
One of our most advanced and automated robot to-date, Typhoon leverages its efficient design to rapidly score notes in the speaker and amp while maintaining excellent maneuverability. Typhoon features evolved controls, allowing our driver to focus more on strategy and less on details, from intelligent two-button teleop controls (the robot decides what action to perform on its own) to various teleop assists and automatons (intake assist, etc).
-
Weight: 122.6 lbs
-
Size: 28" W x 28" L x 27.7" H
-
Intake: Over-the-bumper style pivoting intake using rubber wrapped carbon fiber rollers, powered by a Falcon 500 motor and controlled by a beam break sensor, pivot powered by an independent Falcon 500 for each side
-
Amp: Uses intake to shoot notes into the AMP via an extendable (virtual four bar linkage) carbon fiber deflector rod
-
Shooter: Pivot driven by a profiled PIDF controlled falcon 500 motor on a 9:1 planetary reduction, connected to a 3d printed herringbone circular rack and pinion, uses a pre-tuned firing solution table to score notes from anywhere
-
Hopper: 775 driven belt hopper controlled by beam break sensor
-
Flywheel: Through-axle, full contact flywheel using Colson Performa outer wheels and Andymark Stealth inner wheels, PIDF controlled up to 6000 RPM
-
Vision: 4x Arducam OV9281 connected to 2X OrangePi 5 runing Photonvision, fed to BreakerLib pose filtering and 200hz multi-threded kalman odometry fusion. ML note pursuit in auto and lock-to-note intake assistance powered by an LL3 w/ google coral
-
Drivetrain: SDS MK4i L3 (16T) swerve modules with Kraken Drive Motors, Falcon 500 azimuth motors, and CTRE CANcoder encoders. Powered by BreakerLib.
-
Autonomous: 1 - 5 Note autos with AD* replanning and AI Note tracking/pursuit to improve gamepiece acquisition reliability
-
Regional Finalists: Monterey Bay Regional
- Code: Typhoon (Build Season)

Plop 2023 - Charged Up | Off season
A development platform for next gen competition technologies and a learning platform for new mechanical strategies. Uses a combined elevator/wrist system to rapidly and precisely score cones and cubes in all levels of the grid autonomously, even during Teleop. Competed in the 2023 Madtown Throwdown Off-season competition.
-
Weight: 90 lbs
-
Size: 26" W x 26" L x 33.4" H
-
Hand: Falcon based everybot style intake with 2 Autonics beam break sensors for game piece detection and a PWF CAN ToF sensor for cone position compensation for autonomous and teleop auto-alignment. Single falcon PID-FF actuator for wrist movement.
-
Elevator: Duel falcon grey-t style elevator w/ motion magic control
-
Drivetrain: SDS MK4i L1 swerve modules with Falcon 500 motors and CTRE CANcoder encoders. Field centric and heading compensated control with cardinal field angle snap. Powered by BreakerLib.
-
Vision: Quad Arducam OV9281 Global Shutter USB cameras, each powered by its own Orange PI4 LTS running PhotonVision. On-RIO pose filtering and odometry fusion powered by BreakerLib.
-
Autonomous: 1 and 2 game piece autos with autobalance. Pathing based on Pathplanner.
- Code: Plop
Cthulhu 2023 - Charged Up | MBR
Designed and built from the ground up in the two weeks between our CVR and MBR competitions, Cthulhu represents an evolution of the BreakerBots' 2023 design stratagem. Cthulhu features a more precise single jointed arm mounted low in the robot to more efficiently score both cones and (primarily) cubes in the hybrid and mid nodes of the scoring grid.
-
Weight: 100.8 lbs
-
Size: 26" W x 26" L x 27.7" H
-
Intake: Fixed, tri-roller, 3" compliant wheel based intake powered by a 775 motor on a 40:1 reduction
-
Arm: Single jointed arm powered by a custom Duel falcon gearbox
-
Drivetrain: SDS MK4i L1 swerve modules with Falcon 500 motors and CTRE CANcoder encoders. Powered by Breakerlib.
-
Autonomous: 1, 2, and 3 game piece autos with autobalance. Pathing based on in-house PathPoint system.
-
Gracious Professionalism: Monterey Bay Regional
- Code: Cthulhu
Kraken 2023 - Charged Up | CVR
Uses a double jointed arm to score Cones and Cubes in all levels of the grid. The BreakerBot's first competition swerve drive robot.
-
Weight: 117 lbs
-
Size: 26" W x 26" L x 53.2" H
-
Arm: Double jointed arm powered by 2x custom single falcon gearboxes with gas-shock suspension to counteract gravity
-
Intake: Duel 2" compliant wheel roller intake power by a 775 motor on a 40:1 reduction. The Intake assembly is kept level to the ground by a direct mechanical linkage to the robot chassis base.
-
Drivetrain: SDS MK4i L1 swerve modules with Falcon 500 motors and CTRE CANcoder encoders. Powered by Breakerlib.
-
Autonomous: 1 and 2 game pice autos with autobalance. Pathing based on in-house PathPoint system.
-
Regional Finalists: Central Valley Regional
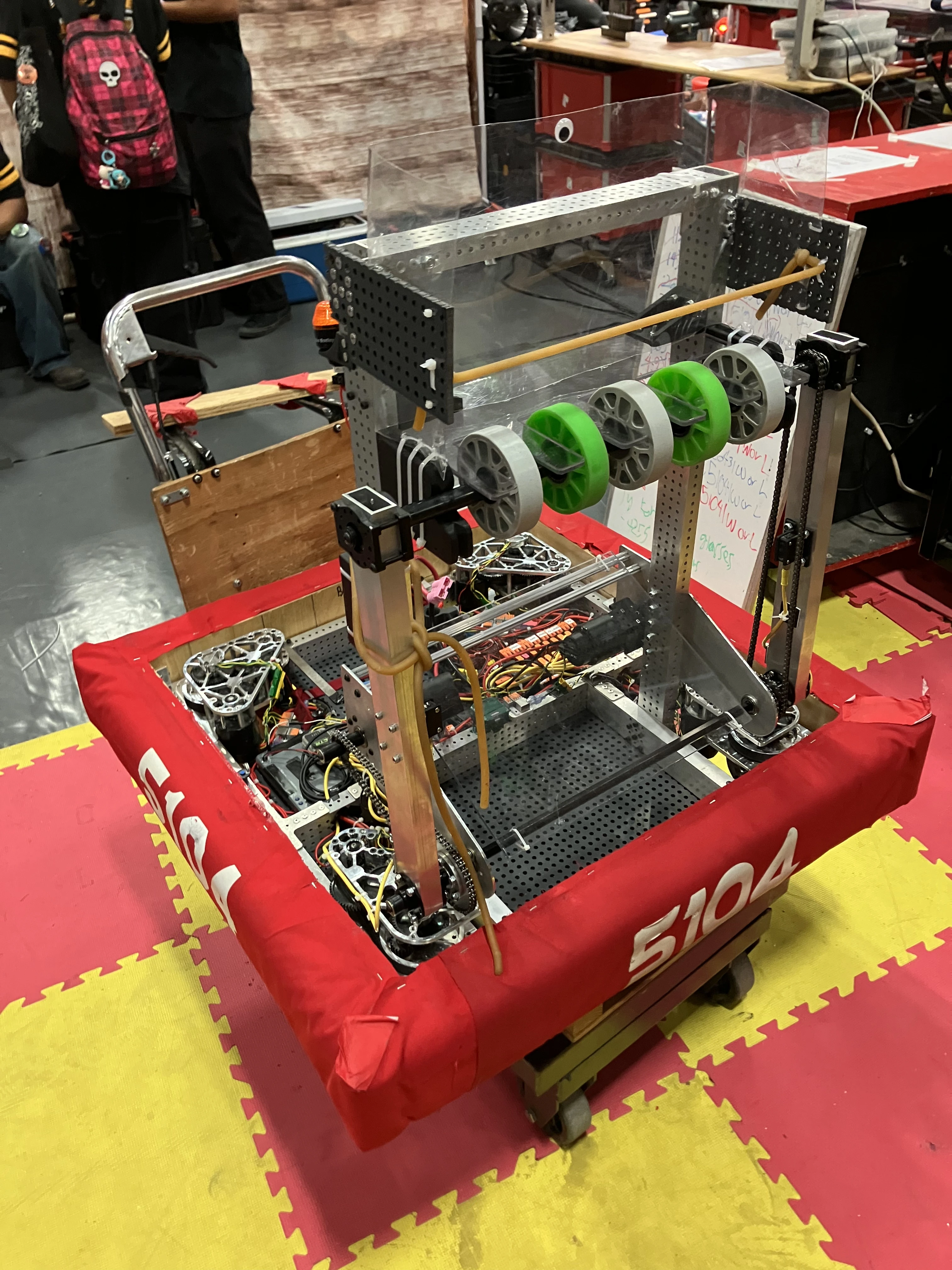
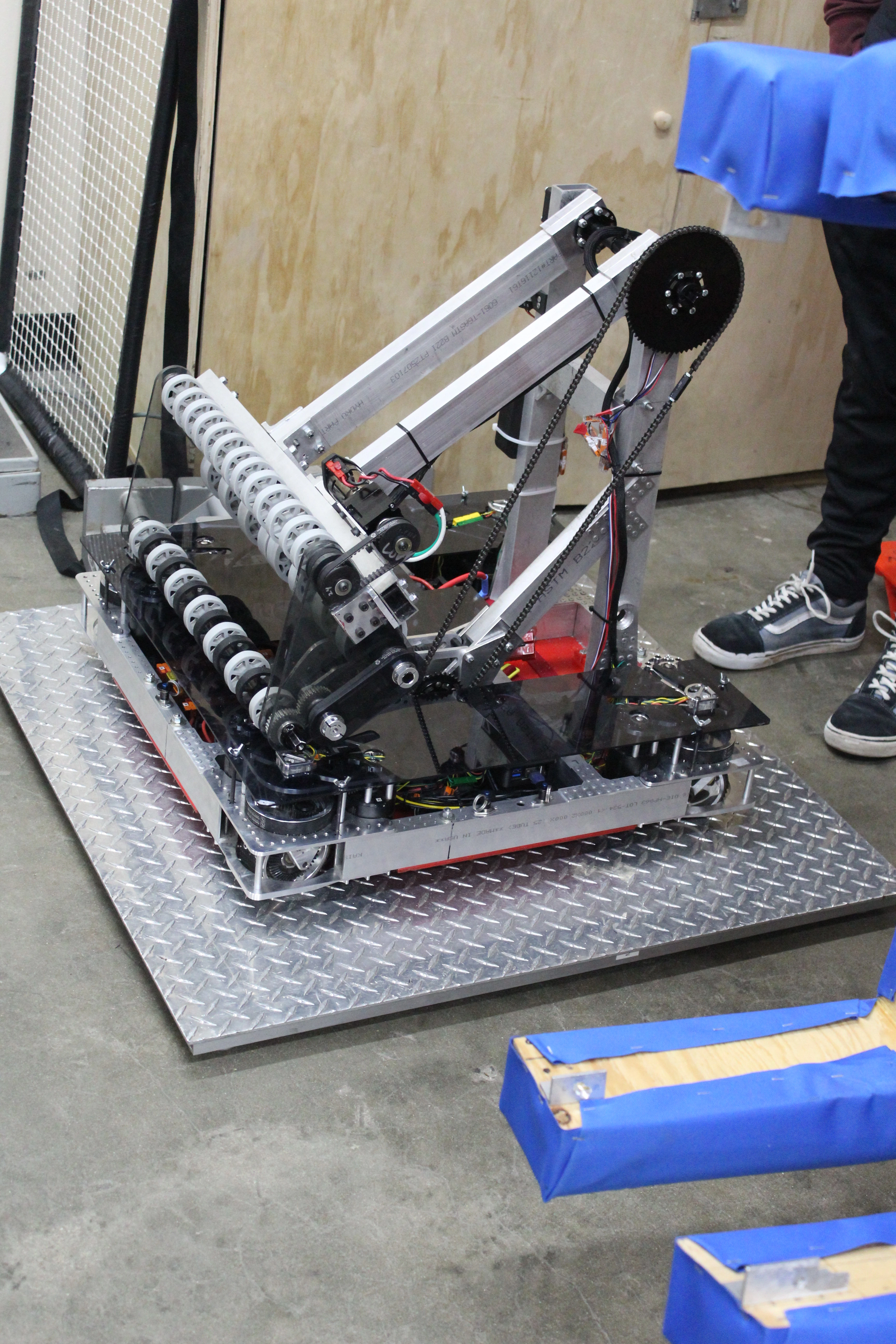
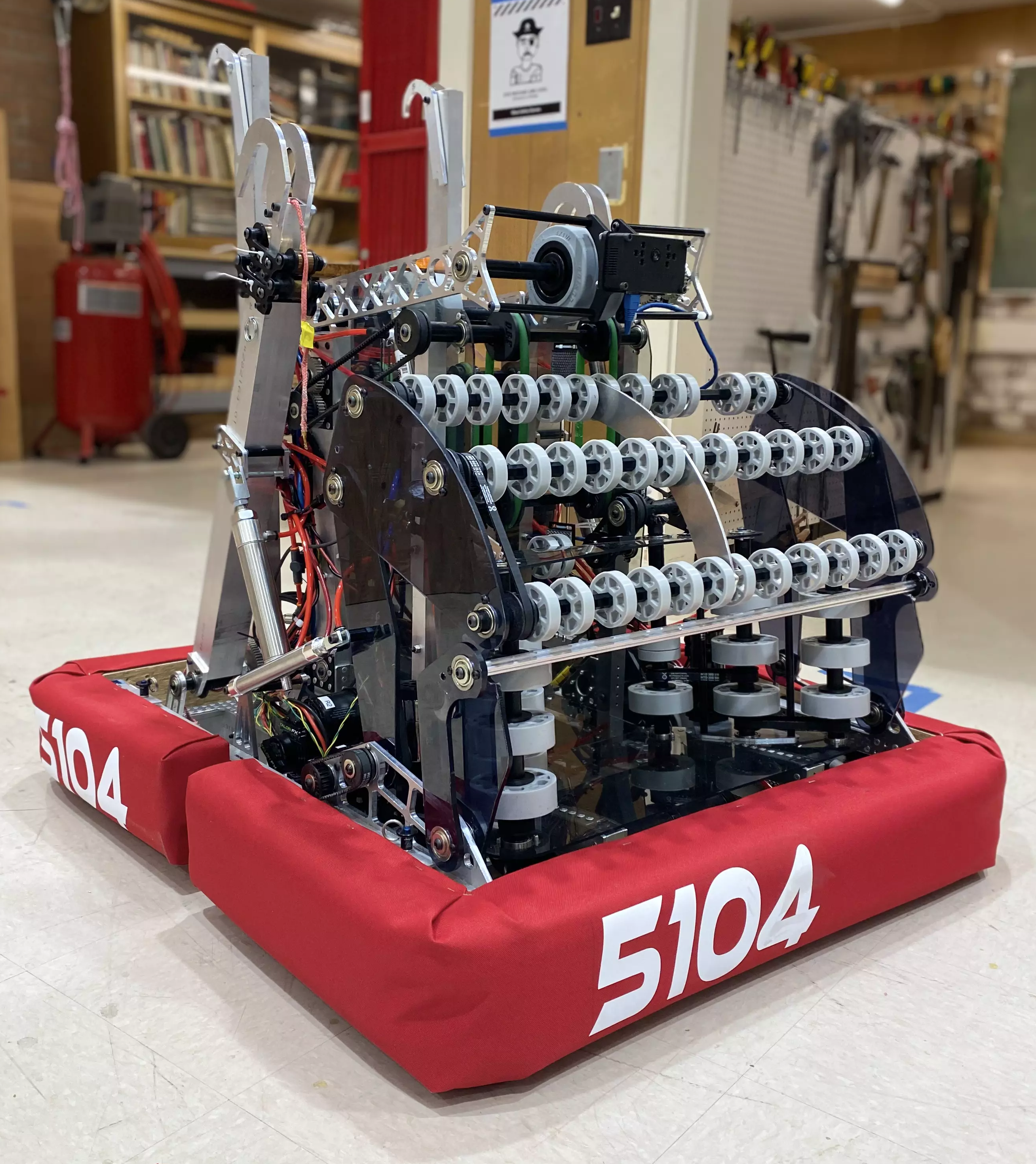
Charybdis 2022 - Rapid React
Averages 9 cycles per match, scoring two cargo into the upper hub each cycle. The flywheel shooter has the ability to shoot to the upper hub or lower hub. With a consistent climb directly to the mid-rung in under 10 seconds.
-
Weight: 122.8 lbs
-
Size: 28" W x 32" L x 38.75" H
-
Shooter: Dual flywheel, 6,000 rpm, 2 limelights for increased driver vision
-
Drivetrain: 6 falcon, WCP Flipped Gearbox (Single Speed, 3 Stages)
-
Climb: WCP telescoping, mid, high, and traverse climb
-
Intake: 4-bar linkage deployable full width intake for consistent cargo pickup
-
Indexer: Centers cargo into hopper, with 18 flex wheels
-
Autonomous: 2 & 3 ball auto
-
Regional Finalists: Monterey Bay Regional
-
Second Seed Alliance Captain: Monterey Bay Regional
-
Excellence In Engineering Award: Monterey Bay Regional
-
Regional Quarterfinalists: Port Hueneme
-
Sixth Seed Alliance Captain: Port Hueneme
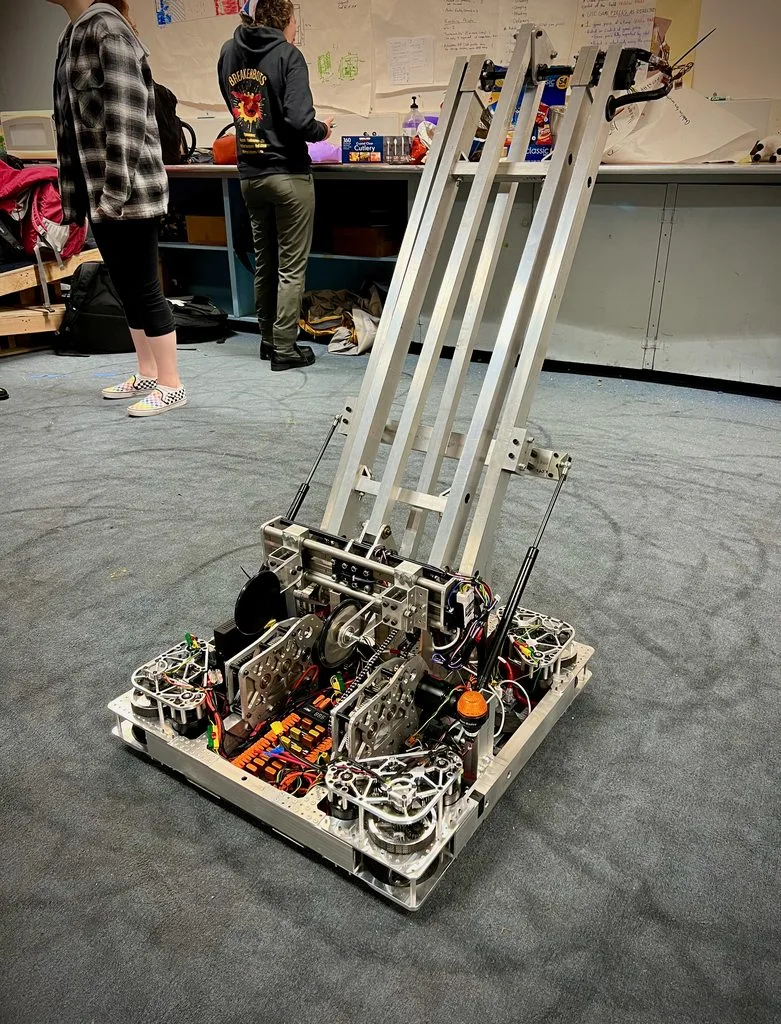
Tsunami 2020 - Infinite Recharge
Capable of shooting power cells across the field into the lower, upper, and inner ports with automatic vision targeting. Uses a flywheel shooter with an adjustable hood and turret for precision aiming. Also capable of climbing the generator switch when over five feet high in under 8 seconds, using a folding bar system.
-
Weight: 125 lbs
-
Size: 28" W x 32" L x 27.5" H
-
Shooter: 270d turret, 40d adj. hood, 9000rpm flywheel, limelight for vision tracking
-
Climber: folding arms w/ under 8 second full climb
-
Drivetrain: Custom falcon gearboxes w/ 11.5 ft/s max speed, 6" wheels with omnis in front
-
Hopper: snake hopper w/ versa rollers for movement
-
Intake: drop down folding deploy, printed mechanum wheels for centering
-
Paneler: 3" flex wheels powered by a 775pro w/ vp encoder and rev color sensor v3
-
Autonomous: 3, 6, and 8 ball autos
- Industrial Design Award

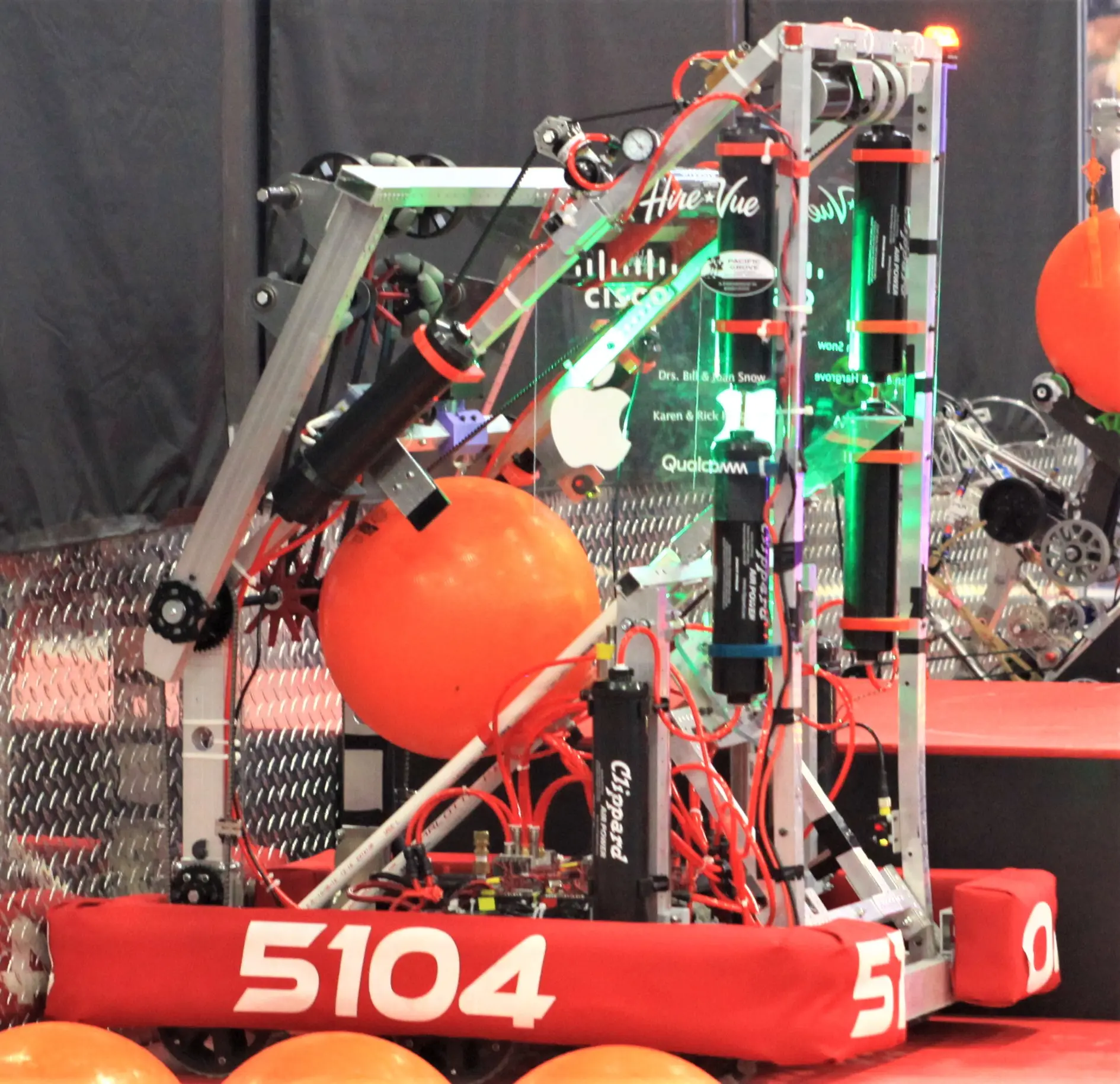
Riptide 2019 - Off season
Built for team outreach and to make our robotics team better known in our school and community. Uses a two scuba tank system to fire t-shirts into the crowd at various events, including school rallies and football games.
-
Weight: ~160 lbs
-
Size: 28" W x 33" L x 24" H
-
Top Speed: 17 ft/s
-
Projectile Range: 100+ ft
-
Pneumatics: High pressure scuba tank at 3000psi, scuba tank expansion chamber at 0psi-120psi, MAC Solenoid Valve for firing
-
Control System: Since 2022 Riptide has used a standard PWM based RC control system
-
Drivetrain: 4x CIM Motors w/ 3" Custom Gearboxes
-
Turret & Pitch: Powered by Bosch Seat Motors
- Code: Riptide

Nebula 2019 - Destination: Deep Space
Capable of placing game pieces in the cargo ship and level one of the rocket. Uses a pneumatic system for handling hatches, a motorized arm and chute for cargo, and an additional pneumatic system for solo Hab-3 climb.
-
Weight: 117 lbs
-
Size: 28" W x 32" L x 47" H
-
Second Seed Alliance Captain: Monterey Bay Regional
-
Regional Semifinalist: Monterey Bay Regional
-
Regional Semifinalist: Central Valley Regional
- Code: Nebula
Athena 2018 - Power Up
Uses a motorized intake and a single column cascading elevator to pick up, transport, and eject power cubes on the switch, scale, and vault. Also capable of climbing with a hook and winch.
-
Weight: 120 lbs
-
Size: 28" W x 33" L x 55" H
-
Regional Finalist: Central Valley Regional
-
Eighth Seed Alliance Captain: Newton Division at Houston World Championships
-
Tournament Semifinalists: CalGames
-
Tournament Quarterfinalists: MadTown Throwdown
- Code: Power Up 2018 Off-season

Archer 2017 - Steamworks
Picks up, transports, and places gears using a passive funnel-style intake and pneumatic ejection. Uses a winch and rachet system to climb at the end of the match.
-
Weight: 115 lbs
-
Size: 40" W x 36" L x 24" H
-
Regional Finalists: Central Valley Regional
-
Fourth Seed Alliance Captains: Turing Division at Houston World Championships
-
Tournament Finalists: CalGames
- Code: Archer 2017
Madoc 2016 - Stronghold
Uses a dual-motor intake system paired with a servo trigger control to collect, transport, and eject 10" foam balls into goals. For maneuverability, uses large, rubber tires and custom (wooden) hubs to be able to cross "defenses" easily.
-
Size: 28" W x 32" L x 12" H
-
Tournament Finalists: CalGames
- Code: Madoc 2016

Klaus 2015 - Recycle Rush
Uses a winch and pulley system to pick up, stack, and transport totes across the field. Also uses wheels to provide omni-directional driving.
-
Size: 27" W x 29" L x 14" H

Felix 2014 - Aerial Assist
Competed in Aerial Assist. The BreakerBots' first robot!
-
Size: 23" W x 32" L x 28" H
- Code: Felix 2014